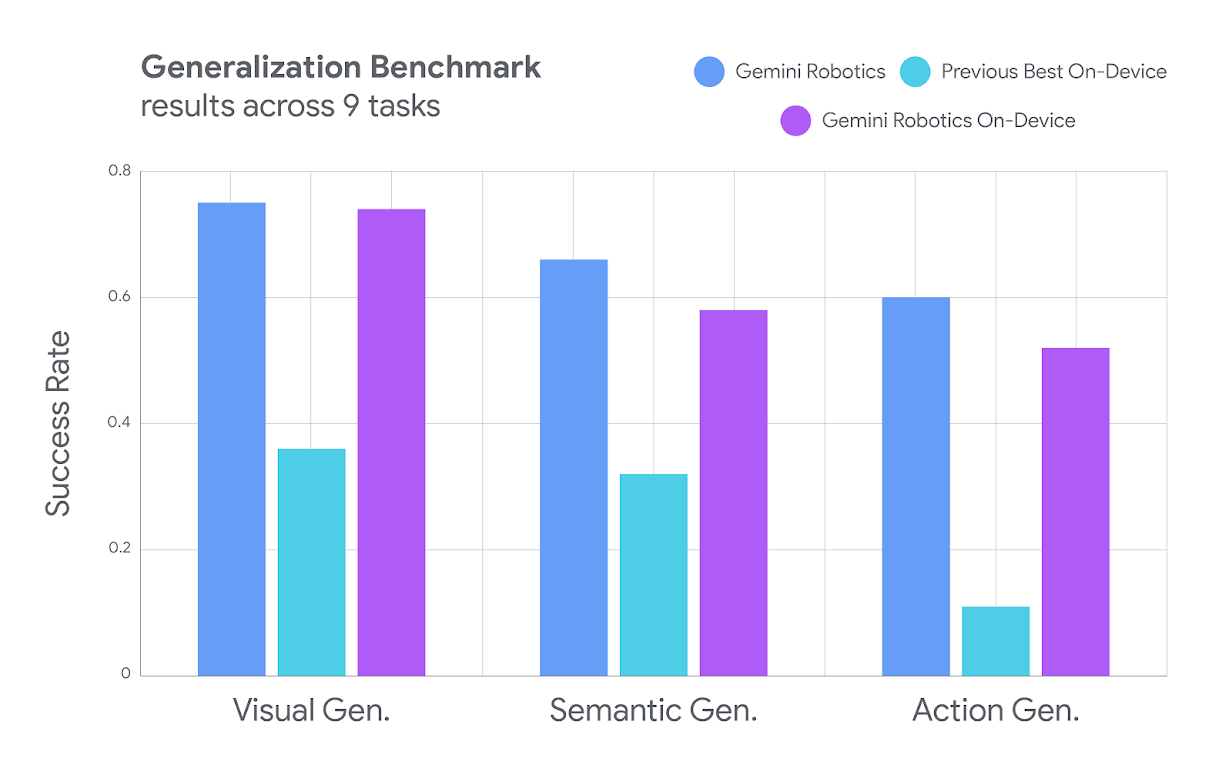
▲强大的泛化能力
它不需要从零开始进行长时间训练,开发者仅需提供 50 至 100 次人工演示,如亲自操控机器人叠衣,模型便能迅速学会并独立操作。
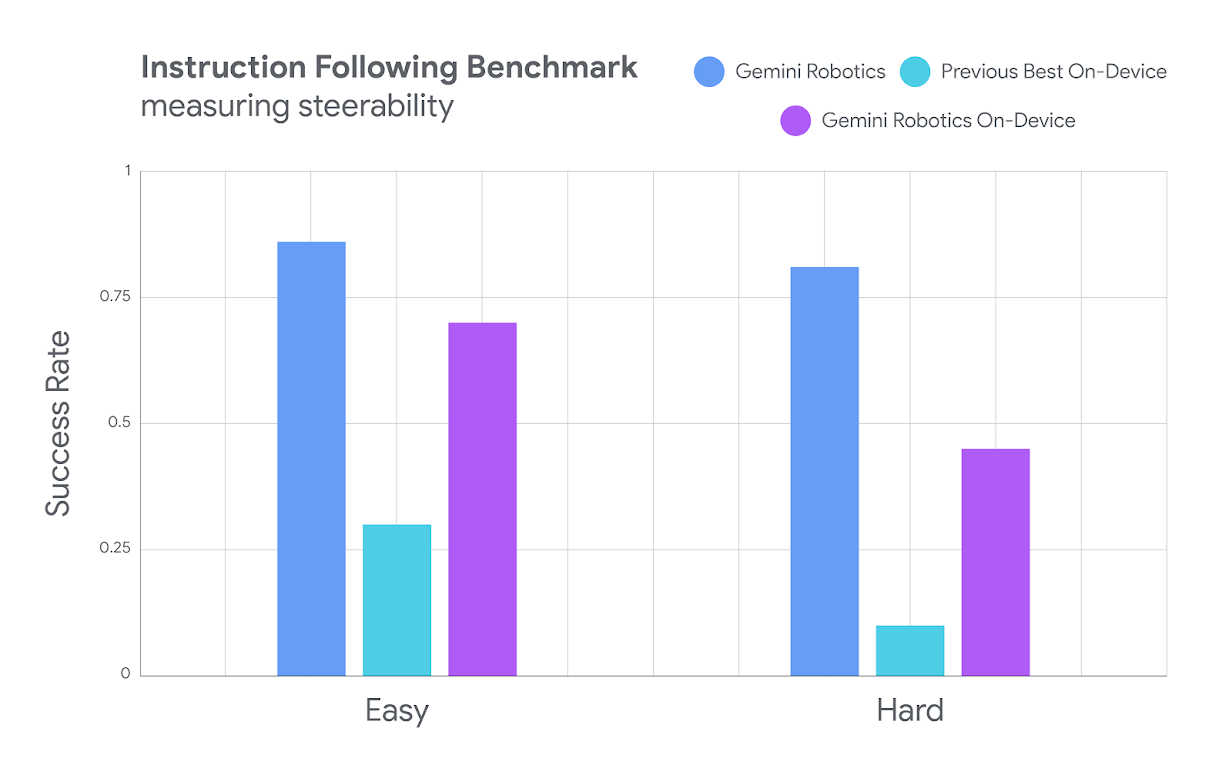
在更具挑战性的分布式任务或复杂的多步骤指令执行中,Gemini Robotics On-Device 的表现依然优于目前其他本地运行的替代方案。
而且,它的适配性也很强。
虽然 Gemini Robotics On-Device 最初在 Google 自研的 ALOHA 双臂机器人平台上进行训练的 ,但稍加适配,它也能稳定运行于 Franka FR3 工业机械臂。
甚至结构迥异的人形机器人 Apollo 也能丝滑运行,同一个通用模型通过少量学习,就习惯了完全不同的身体形态。
理想情况下,开发者无需为每种新机器人重新训练一个 AI,只需训练一次通用模型,之后通过轻量级的迁移学习即可部署到各式各样的机器人平台上。这种「一模多用」的能力将有望加速机器人技术的普及和应用。





